Ázsiai mozaik – 2021. július (1. rész)
(Rovat: Kína a világűrben - 2021.08.03 07:15.)
Havi sorozatunkban az ázsiai országok űrtevékenységével kapcsolatos olyan információkat találnak, melyek önálló cikkekhez túl rövidek, ám talán mégsem érdektelenek. Mi újság a kínai űrállomáson?
Augusztus legelső napjaiban ér félidőbe az első 90 naposra tervezett kínai személyzetes repülés. Ennek kapcsán beszámolunk néhány érdekességről. Mint emlékezetes, a Sencsou-12 háromfős személyzete június 17-én indult az első ázsiai modulűrállomáshoz, és egy ún. gyors csatlakozással még aznap dokkoltak is.
Egyébként a Tienkung űrállomás pályamagasságát tekintve egészen közel van a Nemzetközi Űrállomáshoz (mely mintegy 400 km magas körpályán mozog). Az igazi különbség a pálya hajlásszögében (inklináció) van, hisz az ázsiai űreszközé az 41-42°, míg az ISS-é jóval 50° felett van. Ez a magyarázata annak, hogy Magyarország földrajzi szélességén a Nemzetközi Űrállomás miért látható akár zenit közelében, a kínai tajkonauták otthona viszont csak a horizont felett alacsonyabb magasságban. (Amint arra Juhász Tibor kedves olvasónk felhívta a figyelmünket, cikkünk korábbi változatában tévesen szerepelt, hogy a Tienkung ne volna látható Magyarországról. A heavens-above.com szerint például augusztus 9-től 13-ig minden nap meg lehet figyelni. – A szerk.) A kínai személyzetes űrállomás pályájának paraméterei július 25-én 8 óra világidőben: apogeum magassága 393,2 km, perigeum magassága 385,4 km, inklináció 41,563°, keringési sebesség 7,68 km/s.
Szobakerékpár
Június 23-án Nie Hajseng kicsomagolta a fedélzeti „szobakerékpárt”, így június utolsó hetében és júliusban a három kínai tajkonauta már azzal tarthatta karban lábizomzatát, illetve szív- és keringési rendszerét. Az eszközt a Sanhsziban (Shanxi) lévő (talán) Keleti Fitnesz- és Egészségipari Vállalat(nak fordítható cég) készítette. A vállalat által fejlesztett kerékpár első, korai változatát először Liu Jang tajkonauta hölgy próbálhatta ki a Tienkung-1 űrlaborban, még 2012-ben. Az új Tienkung modulűrállomáson található eszköz ennek már jelentősen továbbfejlesztett változata.
Űrséta és szkafander
Az űrállomáson végrehajtott első űrsétára július 4-én került sor. Az EVA (extra-vehicular activity) legfontosabb célkitűzései a zsiliprendszer, az űrsétaszkafander és a robotkar próbái voltak. Az űrsétaszkafanderről a Hszinhua (Xinhua) hírügynökség szuperlatívuszokban emlékezett meg, megemlítve, hogy az „teljes egészében hazai fejlesztés”. Nos, csak azért, mert a pártirányítás alatt álló kínai hírügynökség ezt állítja, ezzel kapcsolatban hadd legyenek erős kétségeink! Míg a robotkar fejlesztéséhez (lásd később) a kínai szakembereknek az orosz, kanadai és európai robotkarokról maximum tanulmányok, konferenciabeszámolók, fotók és videók állhattak rendelkezésére, a szkafander egy teljesen más történet. A helyzet ugyanis a következő. Az első kínai űrhajós dokkolást eredetileg már 2005-re, az első űrsétát (EVA) legkorábban 2010-re tervezték, de a dokkolórendszer fejlesztése jelentős késésben volt. Politikai, és kommunikációs szempontból viszont elfogadhatatlan volt, hogy évekig nem történik semmi látványos. Ezért 2004-ben eldöntötték, hogy az EVA-t előrébb hozzák, míg két Sencsou űrhajó egymással történő dokkolását elvetették, és egy jóval későbbi Tienkung űrlabor – Sencsou űrhajó dokkolással terveztek. A probléma csak az volt, hogy egyáltalán nem állt még rendelkezésre űrsétaszkafander! Ezért a kínaiak 2006-ban Oroszországból vásároltak mintegy 800 ezer dollár összértékben kilenc különféle Orlan-M szkafandert (a képen jobbra) elemzésre, másolásra és kipróbálásra.
Ezek között volt három tantermi és négy víz alatti gyakorló példány, valamint két „teljes” verzió. Ez utóbbiakból használtak egyet a Sencsou-7 űrhajósai az első kínai EVA-n 2008 őszén, és ekkor sikerült kipróbálni az első kínai űrrepülésen. A „teljes egészében saját fejlesztésű” (sic!) Fejtien (Feitian) szkafandert (a képen balra) első ránézésre csak a sisak üvegezésében lehet megkülönböztetni az Orlan-M-től, ugyanis a látótér jóval szélesebb.
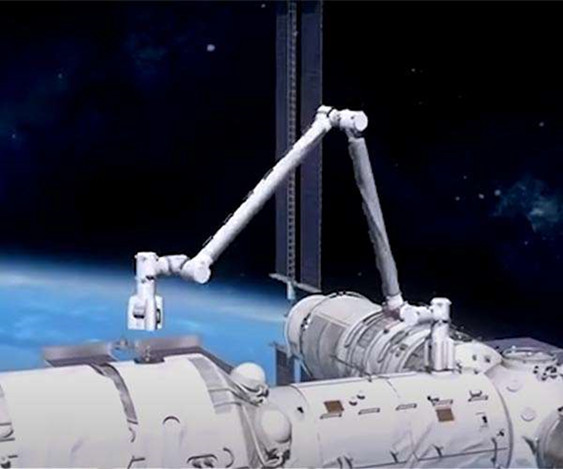
A robotkar
A kínai robotkar a központi űrállomás modul alsó részén, összehajtott állapotban utazott. Az eszköz „magja” 10,2 méter hosszú és akár 25 tonnás eszközt is mozgathat a súlytalanság körülményei között. Természetesen nem csak terheket emelhet/helyezhet ide-oda, de a korábbi orosz, kanadai és európai robotkarokhoz hasonlóan, egy űrhajóst is odavihet a szerelés helyéhez. A karban hét forgópont („izület”), két hosszabb rúd („felkar- és alkarcsont”), két toldat, valamint két kamera található. A kar mindkét végén található egy-egy megfogó eszköz. Ez azt is jelenti, hogy – külföldi elődeihez hasonlóan – ez a kar is át tud települni az űrállomás különféle, kiépített rögzítési pontjaira. Amennyiben az összes toldatot felhasználják és a szerkezetet teljesen kiegyenesítik, teljes hossza eléri a 15 métert. A korábbi (külföldi) robotkarokhoz hasonlóan, a kínai kart is vezérelheti az űrállomás belsejében vagy űrsétán kint tartózkodó űrhajós. A mostani űrsétán mindkét üzemmódot kipróbálták. Sőt, a tajkonauták érkezése előtt kipróbálták a harmadik – földi távirányításos – üzemmódot, amikor a teherűrhajó érkezése előtt megvizsgálták az űrállomásmodul külső részét, kiemelt figyelmet szentelve a dokkolóegységeknek.


| Teljes verzió | Minden jog fenntartva - űrvilág.hu 2002-2025 |