Sikerül-e az újabb japán holdraszállási kísérlet?
(Rovat: Japán a világűrben, A Holdnál , Artemis - 2024.01.17 06:15.)
Nos, hamarosan megtudjuk, hogy a korábbi két kudarc (egy-egy „félkemény” és „sima” landolási próbálkozás) után ezúttal összejön-e minden.
Siker esetén a Szovjetunió, az Egyesült Államok, Kína és India után ötödik országként lenne ott Japán is a Holdon.
Előzmények

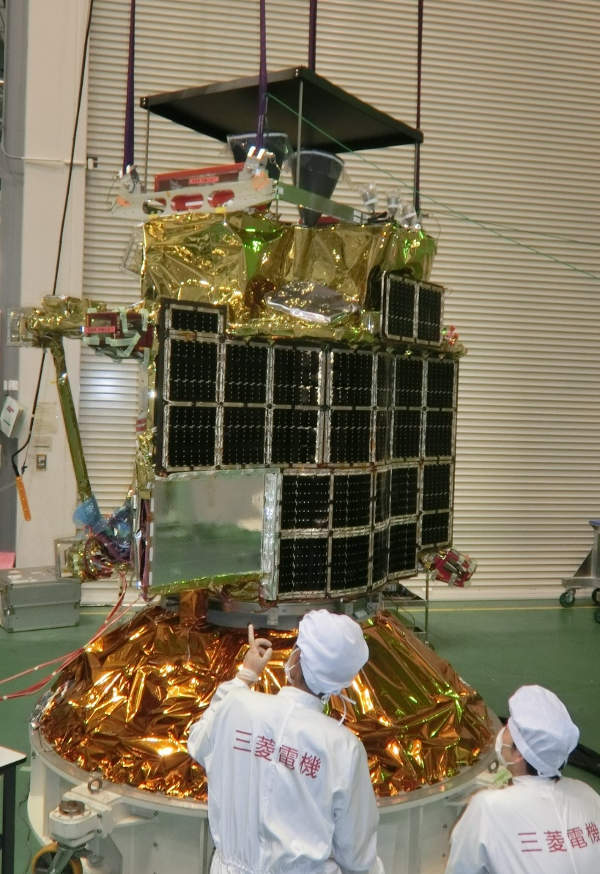
Archívumunk szerint először 2017 márciusában – tehát közel hét éve – írtunk a SLIM-ről: „A SLIM talán már 2019-ben elindulhat, a 164 millió dollár költségvetésű szonda építésére tavaly kötött szerződést a JAXA a Mitsubishi Electric céggel. Azt tervezik, hogy a korszerű navigációs rendszerrel és autonóm akadályfelismerő egységgel felszerelendő szonda egy 60 méter átmérőjű gödörben (lávacsőben) szállna le, amelyet a Hold körül keringő japán Kaguya szonda fedezett fel.”
A SLIM (Smart Lander for Investigating Moon, okos leszállóegység a Hold kutatására) azonban végül csak 4 évvel később, 2023. szeptember 7-én magyar idő szerint 1:42-kor – egy japán H-2A hordozórakétával, a Tanegashima űrközpontból – kelhetett útra. A Hold körüli pályára állás 2023. december 25-én történt meg, a landolási folyamat legkorábban 2024. január 19-én kezdődik, egy finom pályakorrekcióval. Ezt január 20-án (tokiói helyi időben 12:00-kor) követheti a süllyedés megkezdése, majd 20 perccel később történhet meg a leszállás. A kitűzött leszállási pont a 13.3° déli szélesség és a 25.2° keleti hosszúság találkozása, közel a Shioli-kráterhez.
Az izraeli Beresit (Beresheet, 2019), az indiai Csándráján-2 (Chandrayaan-2, 2019), a japán Hakuto-R M1 (2023), az orosz Luna-25 (2023) és az amerikai Peregrine idei sikertelen sima leszállási kísérletei, valamint a japán OMOTENASHI 2022 végi „félkemány” (légzsákos) holdraszállási kudarcai jól mutatják, hogy a leszállás a Holdon ma sem rutin! Persze az is igaz, hogy sikeres volt az eddigi összes (!) kínai automatikus landolási kísérlet, a Csang’e-3, -4 és -5 (2013, 2019 és 2020), valamint az indiai Csándráján-3 lander tavaly.
Szóval az elmúlt öt év 10 kísérletéből csak 4 volt teljes siker, ráadásul az eddigi két japán próbálkozásból egy sem! Épp ezért mindenki nagy izgalommal várja a SLIM leszállását. Ráadásul nem csak azért, hogy végre japán is otthagyja képzeletbeli lábnyomát a felszínen, hanem azért is, mert a SLIM-nek kijelölt leszállási terület csak akkora, mint egy futballpálya! (Összehasonlításként, az Apollo-11 esetében az kb. 20 km × 5 km, míg a Csándráján-3 esetében kb. 4 km × 4 km-es volt.) Ilyen kis célterületre korábban soha, senki nem próbált meg landolni! A landolás során radaros magasságmérőt, lézertávmérőt, valamint az arcfelismerő szoftverekhez hasonló objektum-felismerő programot fognak alkalmazni. Ehhez a nagyfelbontású felvételeket a Kaguya Hold-orbiter készítette. (Erről egy rövid film itt.)
Felmerülhet a kérdés, hogy miért lényeges ennyire pontosan landolni? Természetesen nem a SLIM leszállása miatt, hanem azért, hogy a jövőben a bázisoknál landoló személyszálllító vagy automatikus teherszállító leszállóegységek a bázis területén, és ne attól akár több tíz kilométerre érkezzenek. Szóval a mostani japán próbálkozás nem csak a japánoknak, hanem későbbi együttműködő partnereiknek (ha úgy tetszik, az Artemis Accord aláíróinak) is fontos lesz.
SLIM
A SLIM üresen egy 200 kg tömegű űreszköz, mely üzemanyagokkal feltöltve közel 730 kg-os. Mérete 2,4 m × 1,7 m × 2,7 m. A landeren integrált üzemanyag- és oxidálóanyag-tartályokat alkalmaznak, melyek teherviselők is, így csökkentik a tömeget. Ezeket a Mitsubishi Heavy Industries (MHI) gyártotta. A fékezésről egy kerámia égőtérrel rendelkező, szabályozható tolóerejű és impulzus üzemmódú, 500 N-os hajtómű gondoskodik, melyet az MHI és a Kyocera fejlesztett. A térbeli stabilizációhoz 12, egyenként 20 N-os kisrakétát használnak, ezek az IHI Aerospace fejlesztései. A megközelítés és leszállás során kritikus szerepe lesz a Mitsubishi Electric fejlesztette radaros magasságmérőnek, az előző cég és a Meisei Electric kooperációjában készült lézertávmérőnek, valamint az utóbbi vállalat navigációs kamerájának (lásd korábban). A tömegcsökkentés érdekében napelem „filmet” használnak, melyet közönséges tépőzárral (!) rögzítettek az eszköz felszínére, míg a leszállólábak (vagy inkább leszállóbakok) energiaelnyelő alumíniumhálóból készültek. Ez utóbbit 3D nyomtatták. A SLIM elsősorban technológiai kísérlet, ezért tudományos eszköz csak kettő van rajta. Az MBC egy több hullámhossztartományban működő kamera, míg az LRA a szinte valamennyi holdi leszállószondán megtalálható lézerprizma (a Föld–Hold távolság precíz mérésére). Ugyanakkor magával visz két „potyautast”, amelyek – siker esetén – önállóan fognak működni.
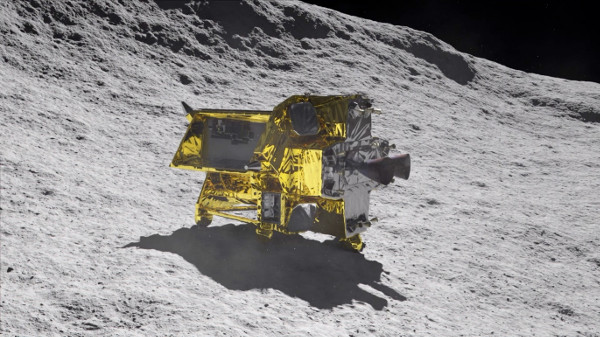
A SLIM a Hold felszínén. (Kép: JAXA)
A potyautasok
A SLIM fedélzetén utazik a LEV-2 (SORA-Q) transzformer rover (záró képünkön jobbra). A két tenyérben elférő, mindössze 8 cm átmérőjű és 250 gramm tömegű eszköz gurulva képes közlekedni. (Elődje a szerencsétlenül járt Hakuto-R1 M1 utasa volt.) A program kutatási fázisa még 2016-ban indult, annak érdekében, hogy részletes talajmechanikai, kőzettani, vezetéstechnikai és egyéb információkkal lehessen támogatni a japán személyzetes holdautó fejlesztését. (A JAXA, valamint a terepjáróiról és SUV-iről ismert Toyota még 2019-ben kötött szerződést egy hermetikus, személyzetes holdjáró fejlesztésére, mely az egyik japán hozzájárulás lenne az Artemis-programhoz.)
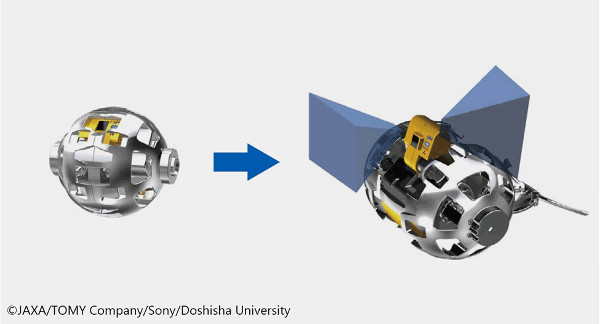
A LEV-2 transzformer holdrobot. (Kép: JAXA / TOMY Company / Sony / Doshisha University)
A kisméretű holdi „transzformert” a TOMY Companyből, a Sony Group Corporationből, és a Dosisa Egyetemből (Doshisha University) összeállt konzorcium hozta létre. Működéséről egy rövid animáció itt látható. Társa, a LEV-1 (a következő képen balra) ugrálva mozog majd a Hold felszínén. Rajta közvetlenül a Földdel való kommunikációra alkalmas berendezés, két széles látómezejű kamera, a hőmérsékletet és a sugárzást mérő műszer is található. Ezen eszközöket eredetileg a MINERVA és az OMOTENASHI programokhoz fejlesztették.
Balra a LEV-1, jobbra a LEV-2 (zárt helyzetben)

| Teljes verzió | Minden jog fenntartva - űrvilág.hu 2002-2025 |