Az ISS, ahogy még nem láttuk
(Rovat: Az űrállomás és kontinensünk, A hét képe - 2015.01.08 07:15.)
Az utolsó európai ATV teherűrhajó augusztusi érkezésekor egy újfajta, a lidar elvén működő dokkolórendszert is kipróbált.
Az Európai Űrügynökség (ESA) által indított, a Nemzetközi Űrállomást (ISS) kiszolgáló teherűrhajók sorozatának ötödik és egyben utolsó tagja, a Georges Lemaître július 30-án indult és augusztus 12-én csatlakozott az űrállomáshoz. Mindez – ahogy 2008 óta mind az öt esetben – automata üzemmódban történt. Legutóbb a megközelítés és dokkolás során már bejáratott rendszerek mellett kipróbáltak egy újat is, amelynek a neve LIRIS (Laser Infrared Imaging Sensors).
A távlati cél olyan dokkolórendszer kifejlesztése, amely adott esetben egy a Földtől sokkal távolabbi, vagy az ISS-nél kevésbé „együttműködő” célponthoz való csatlakozás feladatával is megbirkózhat. A LIRIS kísérletet augusztusban, az űrállomástól már 3500 m távolságban bekapcsolták, és mintegy két és fél órán át üzemelt. Az érzékelők a várakozásoknak megfelelően működtek, a gyűjtött adatokat pedig egy számítógépes merevlemezekre rögzítették. Ezek kerültek vissza földi elemzésre, miután az ESA német űrhajósa, Alexander Gerst a fedélzeten begyűjtötte őket. Az adathordozók szeptemberben tértek vissza a Szojuz TMA-12M űrhajóval. Azóta megkezdték a LIRIS méréseinek összehasonlítását az ATV többi navigációs érzékelője által szolgáltatott adatokkal.
A Georges Lemaître (ATV-5) teherűrhajón elhelyezett LIRIS infravörös kamerái akkor is látták az űrállomást, amikor az félórás időszakokra a Föld árnyékos oldala fölött repült, s így a hagyományos optikai kamerák számára láthatatlanná vált. A fenti infravörös felvétel 70 m-es távolságból készült. Az ATV dokkolását megelőzően az ISS napelemeit elfordítják, hogy a GPS navigációs műholdak rádiójelein alapuló helymeghatározást ne zavarja meg a többutas (a közvetlen mellett a napelemekről visszaverődő) terjedés. Ellenkező esetben előfordulhatna, hogy a teherűrhajó GPS vevőberendezése hamis pozíciót mér. (Kép: Sodern)
A dokkolás előtt négy nappal az ATV 7 km-rel az űrállomás alatt repült, miközben tesztelték a LIRIS infravörös kameráinak működését nagy távolságból. A rendszer lelke egy lidar, ami a mikrohullámú radarhoz hasonló elven, a kibocsátott és a céltárgyról visszaverő elektromágneses sugárzás futási idejét mérve határozza meg a távolságot. A lidar (LIght Detection And Ranging) esetében azonban rövidebb hullámhosszú ultraibolya, látható vagy infravörös fényt alkalmaznak. A LIRIS lézerimpulzusaival így fel tudják mérni a célobjektum – jelen esetben az űrállomás – térbeli alakját. A lézerszkenner a visszaverődés mértéke alapján a megközelítendő objektum anyagáról is szolgáltat információt.
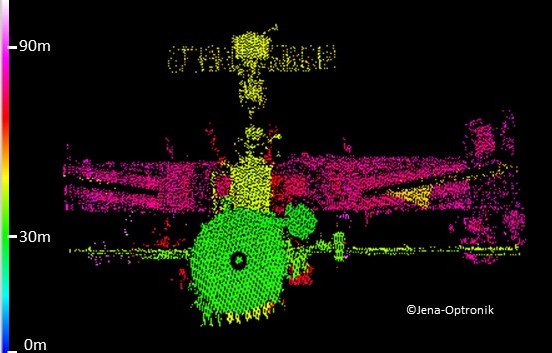
Az ATV-5 és az ISS különböző részeinek távolsága, színkódolással. Az orosz Zvezda modul, ahová a teherűrhajó később csatlakozott és ahol jelenleg is tartózkodik, 30 m-re volt mérések idején (zöld). A Szojuz űrhajó ennél még 15 m-rel messzebb (sárga). Az űrállomás vázszerkezete (lila) további 40 m-rel távolabb volt az ATV-5-től.
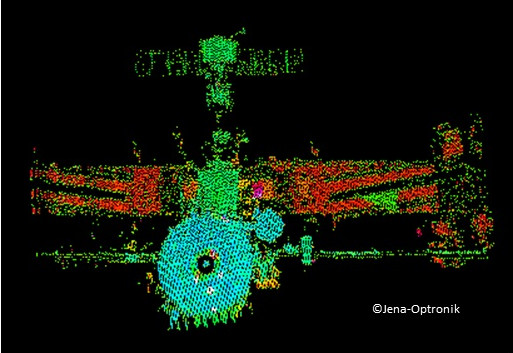
Ezt a képet ugyanazokból az adatokból állították elő, mint az előzőt, de itt nem a távolságot, hanem az adott felületről a lézerimpulzus visszaverődésének mértékét jelölik a színek. (Képek: Jena-Optronik)
A LIRIS működési elvét használó, a megközelítést és dokkolást segítő rendszer nagy előnye, hogy a célobjektumtól nem követel meg semmiféle aktivitást, közreműködést, rádiós kommunikációs kapcsolatot, vagy speciális, a dokkolást segítő céltárgy előzetes felszerelését. A berendezés sötétben és napsütésben is ugyanolyan jól működik.
Az űrállomáshoz közeledő ATV-5, rajta a LIRIS három infravörös kamerája (a bal oldalon, az ESA logójától kicsit jobbra) és a lézerszkenner négyzet alakú nyílása (a logo fölött). (Kép: ESA / NASA / Roszkoszmosz - Oleg Artyemjev)
A LIRIS az Airbus Defence and Space vállalatnál készült. A német Jena-Optronik szállította a lézerszkennert, a francia Sodern az infravörös kamerákat.


| Teljes verzió | Minden jog fenntartva - űrvilág.hu 2002-2025 |