MASCOT – leszállás előtt, első kézből
(Rovat: Távoli világok kutatói, Japán: a Hayabusa űrszonda - 2018.09.30 07:15.)
A japán Hayabusa-2 űrszonda hamarosan lebocsátja az európai készítésű leszállóegységét is a Ryugu kisbolygó felszínére.
Cikkünk szerzője 2010 óta dolgozik Brémában a DLR-nél (Institute of Space Systems), azon belül pedig az Avionics Systems részlegen. Fő feladatköre a műholdas buszrendszerek tervezése (hardver és szoftver architektúra tervezés és megvalósítás), hardver integráció és rendszertesztelés. Jelenleg a GoSolAr payload Command and Data Handling (CDH) alrendszer felelőse és a MASCOT (Mobile Asteroid Surface Scout) leszállóegység fedélzeti számítógépének (OBC) egyik illetékese.
Az alábbiakban egy vázlatos leírást adok a MASCOT-ról és néhány élményemet is összefoglalom vele kapcsolatban.
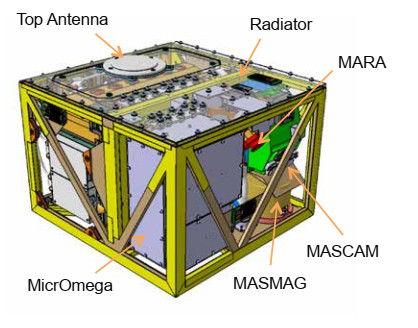
A MASCOT nem más, mint egy körülbelül 10 kg tömegű, high tech, cipősdoboz méretű landoló egység, mely tele van zsúfolva elektronikával és tudományos mérőműszerekkel. A tudományos műszerek a következőek:
- CAM: széles látómezejű kamera
- MAG: magnetométer
- MARA: hőmérsékletmérő berendezés
- MicrOmega: színképelemző mikroszkóp
A MASCOT felépítése. (Kép: DLR / JAXA)
Landolás a Ryugu felszínén
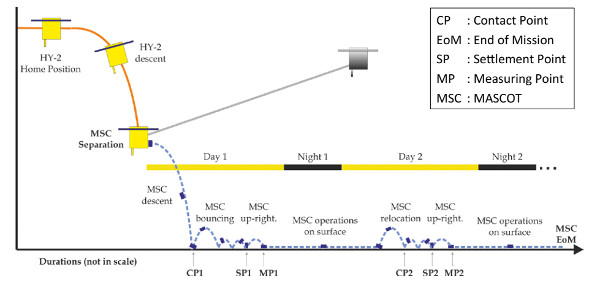
A MASCOT jelenleg kitűnő egészségnek örvend és a tervek szerint 2018. október 3-án, közép-európai időben hajnali négy órakor fog leválni a Hayabusa-2 japán anyaűrszondáról. Majd pár percnyi, 60 méteres ereszkedést követően „földet” ér a Ryugu aszteroida felszínén. A leválást követően Hayabusa-2 nem tér vissza a 20 km-re lévő állomáshelyére (Home Position), hanem 3 km-re marad az égitest felszínétől.
Az ereszkedés (Descent) fázisa alatt fényképek készülnek, mint a MINERVA-II roverek esetében, és a MAG műszer folyamatos méréseket végez. A földet érést követően az Upright fázis következik, ahol a MASCOT felméri a helyzetét és ha nem a megfelelő oldalán landolt, akkor a Mobility Unit segítségével a kívánt pozícióba forgatja magát (Surface). Ezután megkezdi tudományos működését.
Ez a kisbolygó felszínén nappal történik, ami csupán pár óráig tart. Majd következik az ugyancsak pár órás éjjel, ez idő alatt a MASCOT szintúgy méréseket végez. Másnap reggel az éjszaka gyűjtött adatokat feltölti a Hayabusa-2-re, amely a Földre továbbítja azokat. Ezután a MASCOT „átugrál” (Relocation) a következő pozíciójába, ahol további méréseket végez. Ez váltakozik aszteroida-napokon át. A 16 órára becsülhető élettartam vége közeledtével a MASCOT az End of Life (EOL) fázisba megy át, ahol a nélkülözhető eszközöket kikapcsolja és az üzem az adatok feltöltésére, illetve a kommunikációra korlátozódik.
(Kép: DLR / JAXA)
Az operáció
A Hayabusa-2 és a MASCOT jelenleg több mint 320 millió km-re található kicsiny bolygónktól. Ez így közel 2 csillagászati egység, vagyis kétszeres Nap–Föld távolságnak felel meg. Ez a gyakorlatban azt jelenti, hogy az irányítóteremben ülve, ha egy parancsot küldünk a MASCOT-nak – például hogy „kapcsold be a CAM-ot” –, akkor több mint 30 percet kell várnunk a válaszra. Ez néha elég idegtépő, főleg ha a szervernek, Japánban éppen olyanja van, mert az adatokat onnan kapjuk. Azt könnyen belátja az ember lánya, illetve fia, hogy ilyen terjedési idővel nem lehet „online” kivitelezni a küldetést. Tehát most mindnyájan a szoftverben bízunk, s remélünk, hogy az megfelelően ellátja feladatát. Mi csak egy start parancsot küldünk a MASCOT-nak, utána meg hátradőlve monitorozzuk a telemetriát.
MASCOT modellek
Pár szót a MASCOT modellekről, melyekből három darab létezik. Az első és legfontosabb a Flight Model (FM), amely jelenleg repül. Majd van a Flight Spare (FS), mellyel személy szerint sok időt volt szerencsém eltölteni. Ez a modell közel 100%-ban megegyezik a repülő modellel. A szoftver a rendszer legkritikusabb pontja, ezért az újabb verziókat mindig az FS-en teszteltük, validáltuk, majd csak ezután lett az FM szoftvere is aktualizálva. A harmadik modell a Ground Reference Model (GRM), amely Kölnben található az irányítóközpontban. Ez a modell a MASCOT mérnöki és kvalifikációs alkatrészeiből tevődik össze, és főleg teleparancs szekvenciák tesztelésére használjuk.
A szakemberek izgalommal várják a MASCOT landolását a Hayabusa-2 űrszondáról a Ryugu kisbolygó felszínére. (Videó: DLR)
Tóth Norbert
| Teljes verzió | Minden jog fenntartva - urvilag.hu 2002-2024 |